基于端-边-云协同的智慧道路 李静林 2020-08-04 23:14 No Comment 2122次浏览 > 从全球范围来看,智能交通体系已经成为了未来交通系统的重要方向。各地都在这一方向上加紧发力:美国ITS项目规划从国家战略层面,提出大力发展网联 (V2X)技术及汽车应用,欧盟则早早确定了以C-V2X为基础的C-ITS连接车路智能,通过全局协同完成交通主动控制(前摄控制)的发展思路,日本也在积极推进新一代交通管理系统,大力发展基于车路协同的辅助安全系统和智能公路无人驾驶等方面的工作。在这一轮智慧交通的竞赛中,中国要如何脱颖而出,建设好拥有自身特色和优势的交通体系? > 8月3日,北京邮电大学教授、博士生导师,大唐信通副总裁、首席科学家李静林在题为“基于端-边-云协同的智慧道路”的演讲中提出,***“智慧道路”不应该仅仅以支撑“自动驾驶车”为最终目标,智慧道路最终应当回归到如何解决交通问题上去,我们应该从群体智能的角度看智能交通。***  原文链接:[中国汽车报](https://mp.weixin.qq.com/s/Wzyamh83pjyTMjuPiPYZ9w "中国汽车报") # 从单车自动驾驶到车车、车路协同 “毋庸置疑,自动驾驶是车载智能的发展方向,但在经过了一段时间的探索和实践后,业内发现,自动驾驶存在不少问题。”李静林表示,之所以大家会从单车自动驾驶转向布局车车、车路协同自动驾驶,主要是因为在开放道路中,单车自动驾驶存在三大方面的问题。 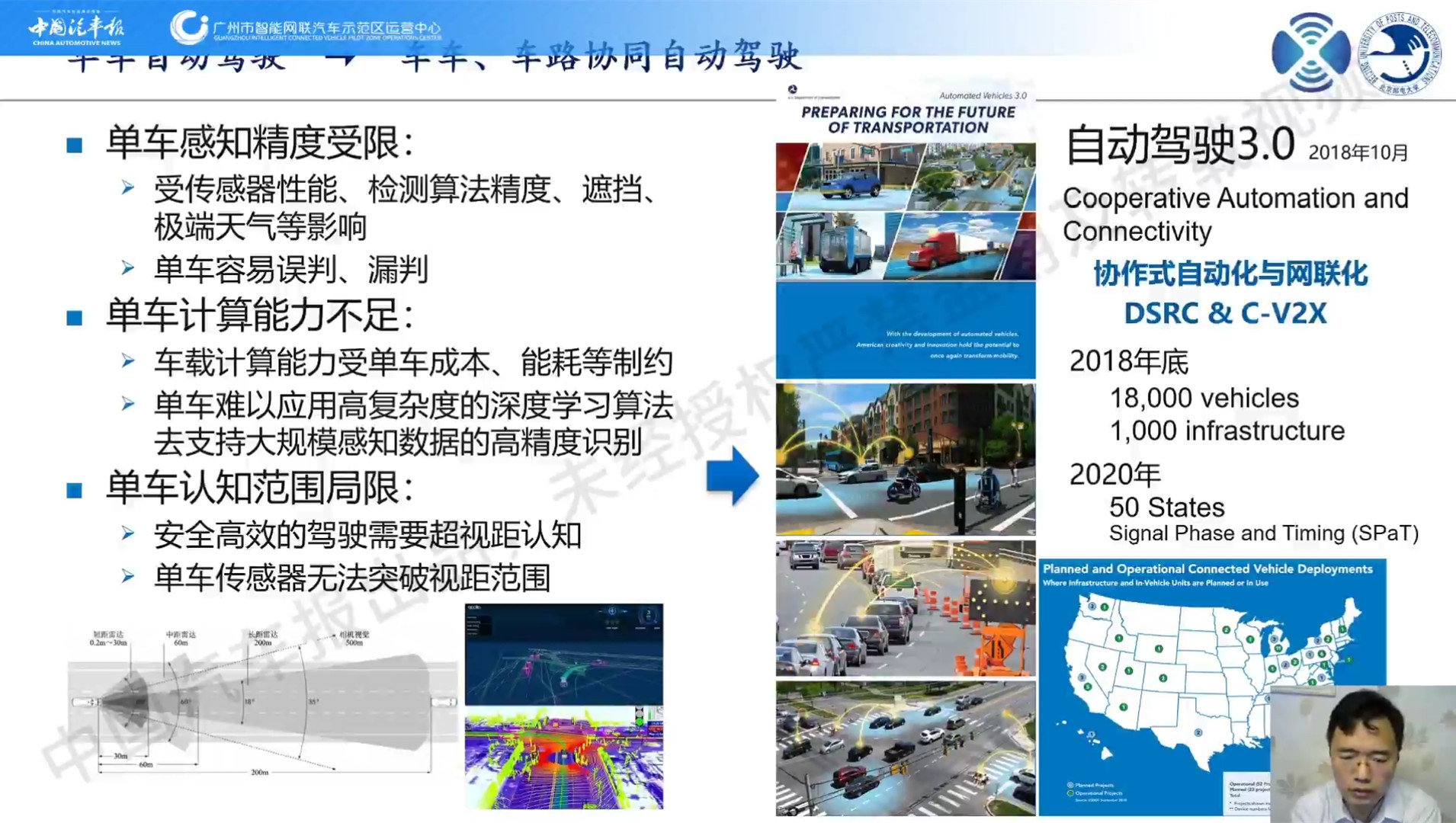 首先是单车感知精度受限。受到传感器性能、检测精度等影响,尤其是遭遇遮挡和极端天气时,单车智能容易出现误判和漏判的情况,严重影响行车安全;其次则是单车计算能力不足。一方面受制于成本,另一方面涉及能耗等问题,单车自动驾驶难以应用高复杂度的深度学习算法,也无法支持大规模全局感知数据的高精度识别;第三是单车认知范围局限。安全高效的驾驶需要超视距认知,而单车传感器无法突破视距范围,这并不是多装几个摄像头或多制式感知融合就能解决的。基于此,以中国为代表的不少国家踏上了车路协同的发展道路。 不过,即便是在确定了车路协同发展的大方向,业内关于具体的技术路线也存有争议,例如DSRC(专用短距离通信)与C-V2X的选择。在过去20年时间里,美国联邦通信委员会始终坚持支持DSRC的路线,其国内5.9GHz频段的75MHz一直被指定用于DSRC。不过,由于窄带、效率不足以及演进路线不明确,这一技术路线逐渐被抛弃,2019年12月12日,美国联邦通信委员会终于一致投票通过了一项提案,重新分配5.9GHz频段的大部分频谱,并将这些频谱专用于非授权频谱技术和C-V2X技术。在李静林看来,C-V2X效率高,频谱利用率高,LTE-V、LTE-eV2X、NR-V2X演进明确,自然会得到中国和欧盟等大多数国家的认可。 # 交通系统本质上是一种群体智能系统  确定了车路协同的发展方向和C-V2X的技术路线之后,新的问题也随之诞生:智慧道路建设的重点是什么?协同自动化的重点是“协同化”还是“自动化”?是车“联网”还是车联“网”? 对此,李静林表示,“智慧道路”不应该仅仅以支撑“自动驾驶车”为最终目标,我们应当追求的是人、车、路、环境的智能协同。“交通系统本质上是一种群体智能系统。”李静林指出,其根本的目标包含两方面,第一个是安全目标,即通过协调多个智能个体(车辆),保证运输的人与物安全抵达目的地;第二个则是效率目标,通过协调多个智能个体(车辆和路侧设施),使得合作涌现出的宏观路网交通态势更稳定和均衡,达到交通更通畅的目的。因此,如果从群体智能角度看智能交通,需要解决的是单智能个体认知和多智能个体的协同这两大问题。 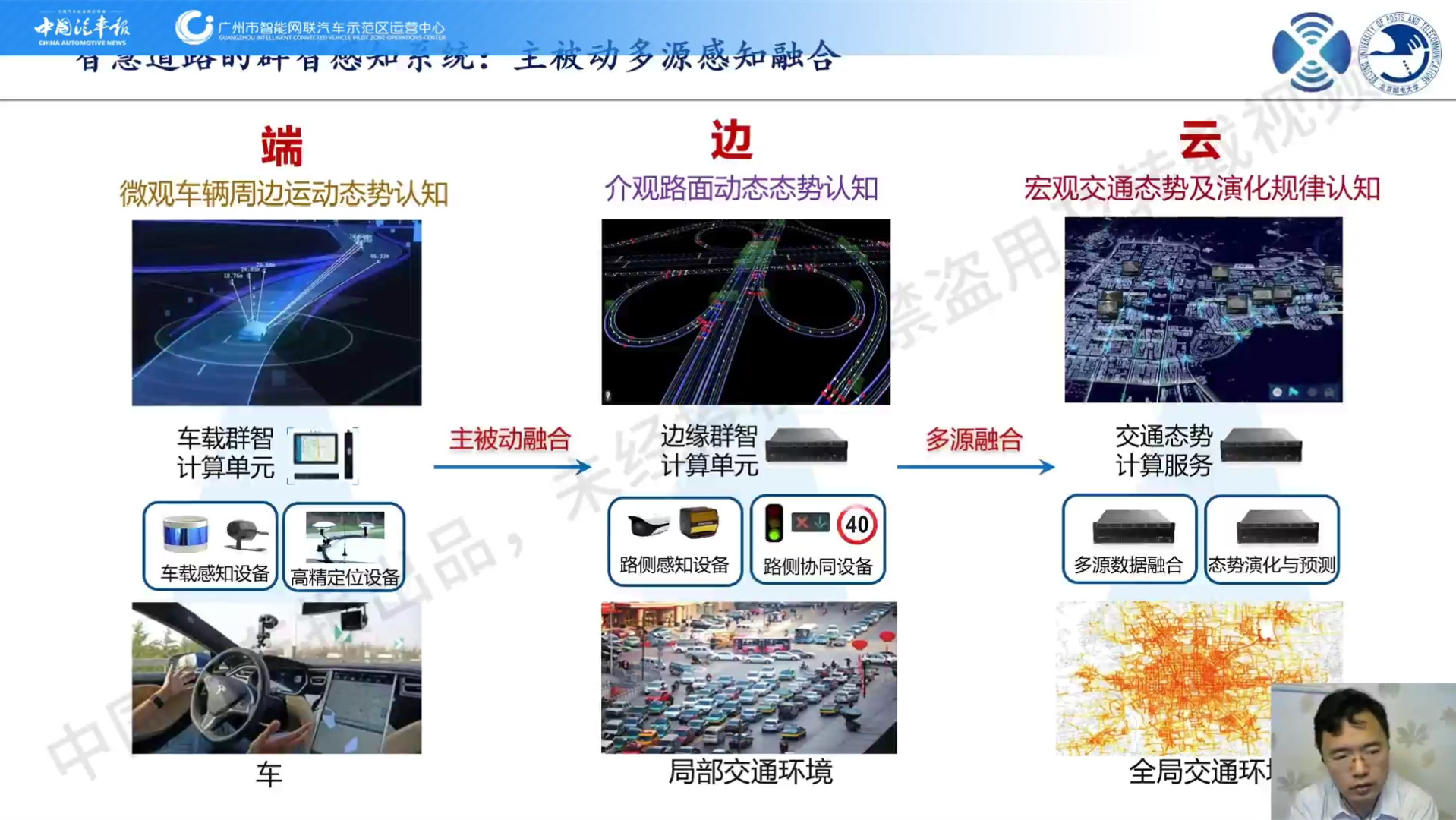 李静林强调,只有基于“感知 - 通信 - 计算”的深度融合,综合“高精度感知、泛在移动通信、人工智能”技术,实现多车路群体协同认知与决策控制,才能实现从被动的交通信息服务向主动的交通管理服务转变,最终帮助智慧道路朝着自治管理和自主运行的方向发展。在智慧道路的群智协同系统中,“端”、“边”、“云”各司其职,微观车辆进行周边的运动态势认知,介观路侧开展路面动态态势认知,宏观层面则进行交通态势及演化规律的认知,做到主被动多源感知融合,并通过车车协同决策、车路协同决策以及系统协同决策相互配合,最终实现端-边-云的群体协同。 在谈到相关技术应当如何配置时,李静林提出,重点解决偏向于安全驾驶问题的技术,应该配置在车端,与之相应的,路测和云端应当配置一些侧重交通效率和辅助安全的技术。基于此,车企应当更倾向于布局和掌握感知、认知、通信及面向安全驾驶的智能决策和驾驶控制技术,以支持超视距认知和安全驾驶;对于交通部门或智能交通的建设单位来说,可以重点着手于完成路测的技术配备工作,例如多传感器的感知认知、C-V2X、边缘计算与群智计算等,以支持面向交通效率的多车路协同决策。 # 智慧道路现状四大不足  从示范区到先导区到交通强国试点,从智慧高速的“遍地开花”到5G车路协同应用示范,全国各地的智慧道路可谓如火如荼,成为了各地重点拼抢的产业制高点。但李静林表示,在产业高速发展、资本争抢进入的当下,目前智慧道路的建设存在四大方面的不足,应当引起各方的注意与重视。 - 首先是新型基础设施滞后。目前包括5G基站、路侧单元等新型基础设施建设都属于起步阶段,低于智能汽车的研发和示范进度。“要上路,先修路”,无论自动驾驶汽车还是智能化升级后的普通汽车,都需要车路协同支撑下的智慧道路建设支持; - 其次则是重建设,轻运营的问题较为突出。总体来看,全国部分地区的一些试验路段和示范试点项目,属于着急“建起来”却荒于“用起来”,商业模式的探索尚未进入实质阶段。“车联网车路协同的最大的商业价值不在于产品,在于持续运营。”李静林遗憾地指出,目前这一块现在基本空白,行业内需要一个类似于运营商这样的基础设施建设管理和服务者,来为大众提供相应的服务,只有这样,才能真正屏蔽掉底层的复杂性,增强企业开展面向大众业务的兴趣和可能性。 - 第三,规模用户未出现。与单车智能不同,只有规模化用户出现,智能网联才能体现出整体系统安全、 成本、效率等优势。国内目前主要以技术示范区为主,未出现常态化使用的城市级示范区,李静林建议,需要有前瞻性的地市和系统性的解决方案厂商做出示范区,引领全国大规模商用。 - 第四,“跨界”协同不足。李静林直言,我国各地道路资源分属交通、公安、市政等多个部门管理,各地道路资源所购设备型号、规格、数据接口等都不一致, V2X建设需要有较强的政府支持和技术兼容能力,实现多种形式的数据统一、融合与应用。 有理由相信,随着国内道路基础设施改善步伐的大大加快,再加上我国在通信领域以及互联网行业逐渐具备全球领先的优势,只要能够实现跨产业协同,集中突破智慧道路建设的技术短板与思维局限,智慧交通体系也将早日建设完成,以此为契机,我国智能网联汽车的发展也将迈上一个新台阶。