面向智能网联汽车与智能交通的算网一体智能机器网络 李静林 2023-12-27 19:03 No Comment 1785次浏览 > 12月27日,受北京市科学技术协会委托,联通智网科技股份有限公司组织专家召开了算力网络应用示范的决策咨询研讨会,李静林在会上围绕算力网络在智能网联汽车及智慧交通领域的技术应用进行了《算网一体智能机器网络》的主题分享  5G网络的高可靠、低时延、大带宽、广连接特性已经支持海量智能设备的“物联”,而B5G/6G网络,将通过全域覆盖、通感一体、智慧交互等技术,赋能人工智能,实现“普惠智能”,满足海量智能设备的“智联”。从5G到B5G/6G将产生网络的本质改变,从信息的泛在可取到智能的泛在协同,从单纯的通信到通信与智能的融合。 在以车联网和自动驾驶为代表的智能交通领域,智能化给网联化和协同化带来的挑战主要包括四方面: 1. 看不见,在自动驾驶过程中,车辆存在视觉盲区,需要车车车路多源异构融合,才能解决自动驾驶盲区认知问题,但车辆移动导致多车和车路协同拓扑时变,进而导致协同需求时变,难以高效解决认知需求发现问题。 2. 通不上,在车路协同过程中,通信和感知是耦合的,在需要认知的时候,通信不一定能保证QoS,而能够保证QoS的通信连接又不一定正好是车路协同的交互需求方。因此需要V2V-V2I-V2N按需协同,联合感知和通信进行协同拓扑优化和资源分配。 3. 不相信,在车路协同过程中,自动驾驶车辆对协同方的时空确定性和内容可信性存疑,需要考虑感通一体联合保证时空确定性,并提供内容可信性评价体系,或提供新型的计算托管机制,让协同的双方能具备基本的互信,这样才能将服务驱动起来。 4. 管不了,大规模交通系统存在复杂耦合,大量的自主化的智能群体相互影响,尚未有准确的群智涌现的发现和引导方法,这就导致交通环境当前仍然存在有态无势的问题。单纯的交通数字孪生无法应对这一问题,需要深入考虑智能群体态势演化,以提高交通管控体系的有效性。 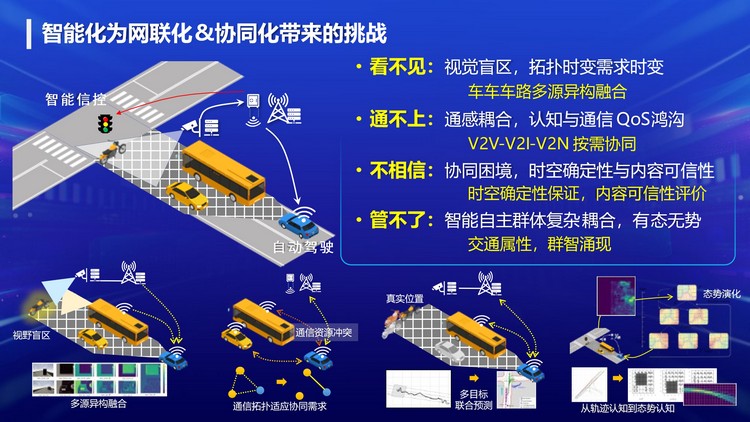 未来的智能机器网络需要具备两方面特征: 1. 感通定位一体,通过车路协同过程中的协同感知、协同决策需求驱动,在感知-通信-定位一体化基础上,实现认知-通信的相互耦合相互增强,保证按协同需求驱动通信服务质量保障。 2. 智算网一体,通过5G/V2X柔性动态拓扑控制,分层边缘计算与算力动态路由,基站与网络切片资源的动态调度,实现车路协同需求驱动的智算网资源的联合调度,支持智能化机器终端和服务的幼小协同。